Metoda całkowita Lagrange’a

Belka Timoshenki
24 lutego, 2026
Funkcja „Query” w post-processingu MES
25 lutego, 2026
Gdy na strukturę działa siła lub moment, jej kształt ulega zmianie, a skala deformacji zależy od wielkości przyłożonego obciążenia oraz sztywności obiektu. Miękkie ciała o niskiej sztywności mogą pod wpływem dużych sił ulegać znacznym deformacjom, podczas gdy w przypadku sztywnych obiektów zmiany kształtu mogą być niewielkie. W sytuacjach dużych przemieszczeń i rotacji konieczne jest stosowanie analizy nieliniowej, w której obliczenia wykonywane są iteracyjnie, najczęściej z wykorzystaniem metody Newtona-Raphsona.
Spis treści
Układ odniesienia w analizach nieliniowych
W analizach dużych deformacji kluczowe znaczenie ma wybór układu odniesienia, względem którego opisywane są przemieszczenia, odkształcenia i naprężenia. W analizach nieliniowych stosuje się dwa podstawowe warianty metody Lagrange’a:
- metodę całkowitą Lagrange’a (Total Lagrangian) – wszystkie wielkości odnosi się do początkowej, niezdeformowanej geometrii,
- metodę zaktualizowaną Lagrange’a (Updated Lagrangian) – układem odniesienia w każdym kroku obliczeń jest aktualna, zdeformowana konfiguracja.
Istota metody całkowitej Lagrange’a
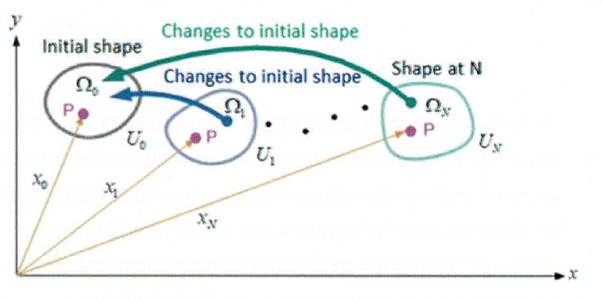
W metodzie całkowitej Lagrange’a wszystkie wielkości fizyczne — obciążenia, odkształcenia i naprężenia — odnoszone są do pierwotnego kształtu konstrukcji. Oznacza to, że:
- konfiguracja początkowa pozostaje stałym układem odniesienia w całym procesie obliczeniowym,
- tensory odkształceń i naprężeń wyrażane są względem początkowej geometrii,
- obliczenia iteracyjne prowadzone są przy zachowaniu odniesienia do tej samej konfiguracji.
Takie podejście jest szczególnie wygodne, gdy geometria początkowa jest dokładnie znana i nie ulega zmianie w sensie definicyjnym, co upraszcza formułowanie równań i implementację numeryczną w analizach MES.
Zastosowanie i porównanie z metodą zaktualizowaną Lagrange’a
Metoda całkowita Lagrange’a jest często stosowana w analizach nieliniowości geometrycznej oraz materiałowej, zwłaszcza gdy deformacje są duże, ale opis matematyczny wygodniej prowadzić względem konfiguracji początkowej. W porównaniu z metodą zaktualizowaną może być jednak mniej efektywna obliczeniowo w niektórych problemach, ponieważ wymaga przeliczania wielkości fizycznych względem pierwotnej konfiguracji w każdym kroku iteracyjnym.
Wybór pomiędzy metodą całkowitą Lagrange’a a metodą zaktualizowaną zależy od charakteru analizowanego problemu, zakresu deformacji oraz zastosowanego algorytmu numerycznego w środowisku MES.